Lecture 5: Going further
This lecture introduces more advanced applications of linkage-related movement that involves various disciplines of architecture, fashion, product design and arts, through which students can bring their projects further according to their own interests and disciplines.
- Linkage extended
- From flat linkages to the linkages in space
- Deployable structures
- Responsive facade
- Transformable interiors
- Arms and legs
- Interaction
- Origami, pleats and linkages
- Soft movement
- Soft robotics
- Auxetic metamaterial (kirigami)
- Read/Watch
- Exercises
- Slides
Linkages extended
So far, we have focused on flat linkage-based mechanisms and their rather simple applications. Now it is time to push the envelope and look beyond what we have learned in a broader context. Actually, linkages are related to a variety of fields of architecture, design and art! Let’s dive deep into what is possible with linkages!
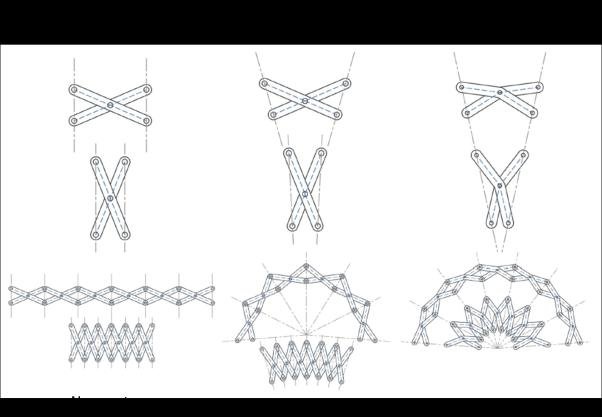
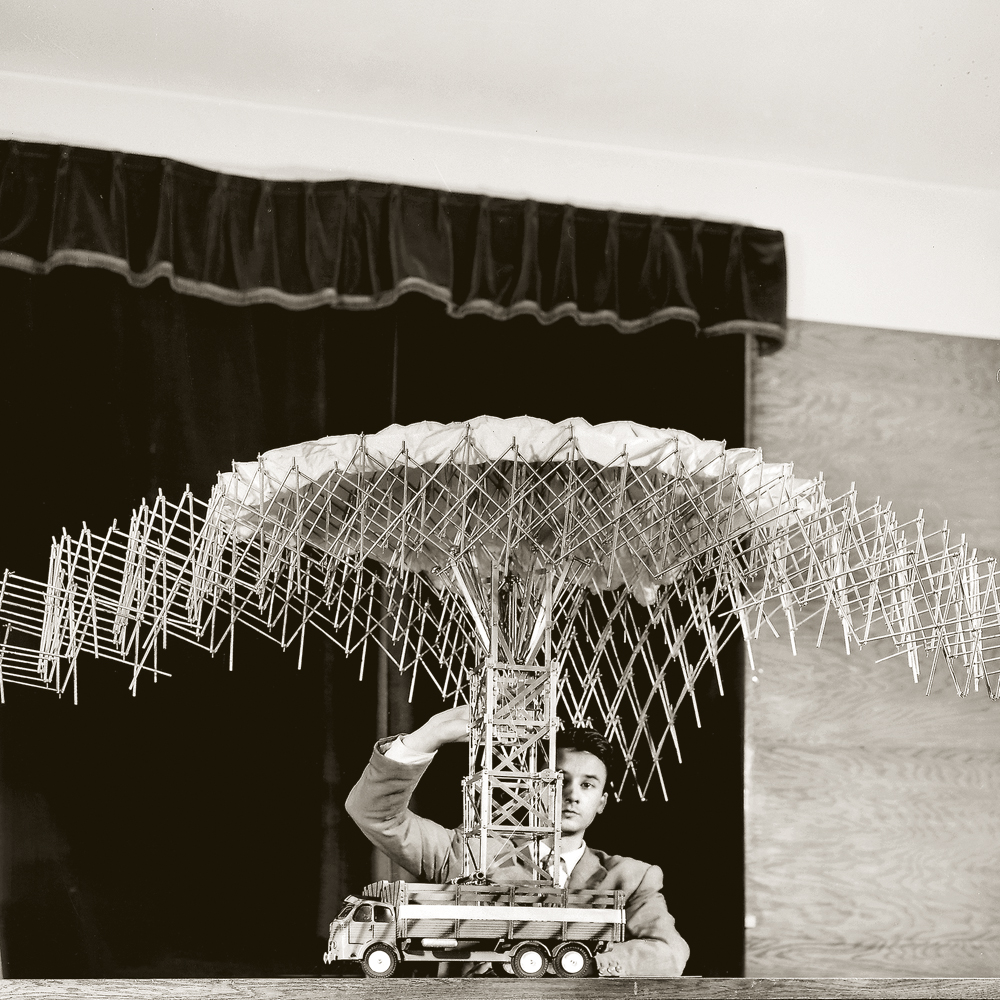
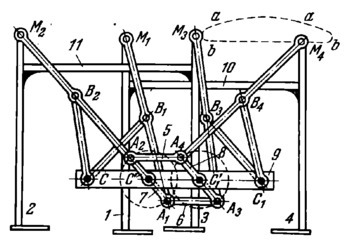
From flat linkages to linkages in space
The potential of linkages is not limited to flat applications but can be extended to three dimensional ones in space, for example as a deployable structure:
As a responsive facade:

For transformable interior design:

Arms and legs
Robotic arms and legs are typically, but not always, based on linkage mechanisms just like human beings’. How to design and control them is an important topic in robotics. Depending on the purpose and the desired performance, the design of mechanism varies.
Interaction
Though the design of interaction is beyond the scope of this course, making the movement responsive to various input signals, for example, of the environment and of the human body will elevate your projects by far. There are quite a few online/offline resources and lectures available on this topic that you can refer to.

Origami, pleats and linkages
In addition to the bar-type linkages, flat sheets joined by hinges are also considered a type of mechanical linkage. Rigid origami is a branch of origami that is concerned with the topic of rigid flat sheets and there are a variety of applications of it in architecture and product design.
Soft movement
Soft robotics is a subfield in robotics. A soft robot’s bio-inspired, flexible and natural material and movement allows it to do tasks with increased safety, particularly in the field of medicine and manufacturing. (Wikipedia) Noticeable is its unconventional approach to robotic materials and technologies, for example the use of craft materials and techniques such as paper folding and fabric pleating. Apart from its increased functionality and efficiency, in soft movement is room for exploration in art and design in terms of its soft materiality and choreography.
On the other hand, metamaterial is a material with an engineered property that is not found in nature. Among them, auxetic material using kirigami and origami techniques can create subtle changes of texture and opening.
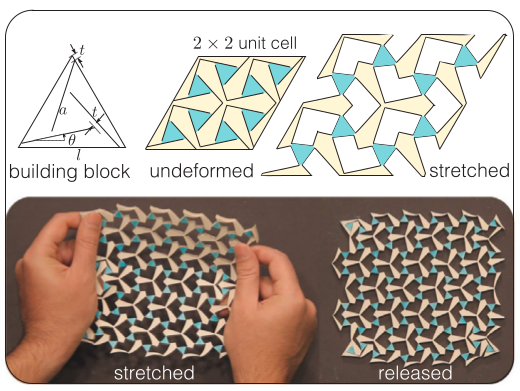
A. Rafsanjani and D. Pasini. 2016. “Bistable Auxetic Mechanical Metamaterials Inspired by Ancient Geometric Motifs.”
Read/Watch
- From flat linkages to the linkages in space
- Arms and legs
- Interaction
- Origami, pleats and linkages
- Soft movement
- More to read/watch
Exercises
- Find out the most interesting part in relation to your discipline and read/watch the references in those areas.
- Ideate and pitch your future project idea.